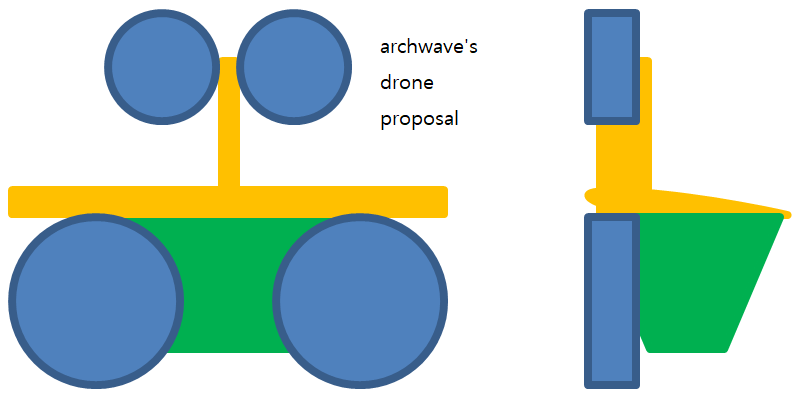
청색은 프로펠러, 주황색은 수직안정날개와 수평날개, 녹색은 동체(페이로드)
작은 프로펠러 2 개는 동축반전형 프로펠러 1 개로 대신할 수도 있겠고,
동체는 (오른쪽처럼 세웠을때 기준) 앞뒤로 좀 길게 해도 되겠죠.
왼쪽 그림 - 이착륙시에는 쿼트콥터 형태의 드론과 마찬가지로 프로펠러에 의해 상승하면서,
기체를 기울여서 수평 속도와 양력 동시 확보.
오른쪽 그림 - 고도 확보후 기체를 세워서 프로펠러로는 추진력만 얻어서 수평 속도에 올인.
양력은 커다란(?) 수평날개로만 얻고요.
현재 개발하고 있다는 틸트로터 무인기를 보면 유인기인 오스프리와 같은 형식입니다.
사람이 탈 것도 아닌데, 굳이 이런 형상을 유지하려 드는지 모르겠네요.
쿼드콥터의 수직이착륙 성능, 틸트로터의 수평 비행 속도 두 가지를 모두 잡을 수 있는 형태라 생각됩니다.
정찰 용도인 경우에도 카메라 안정을 위한 짐벌은 어차피 필수입니다. 즉 기체가 누웠다 섰다 하더라도
카메라 운용에 전혀 지장없죠.
프로펠러 4 개의 원활한 제어에 대해 우려도 있을 수 있는데, 그냥 전기모터 4 개를 사용하면 됩니다.
대형(?) 기종인 경우 전력은 배터리가 아니라 기름을 쓰는 발전기를 탑재하면 되고요.
실제로 [ 발전기 + 전기 모터 ] 는 상당히 많이 쓰이고 있죠.
위 드론의 기동성을 더 높이려면 수직안정날개와 수평날개에 플랩을 달아서 쓰면 되겠고요.